 The PASS3D architecture for point-wise semantic segmentation.
The PASS3D architecture for point-wise semantic segmentation.Abstract
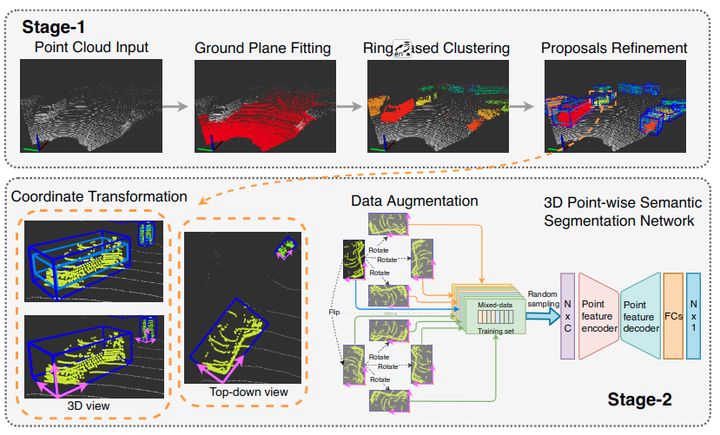
In this paper, we propose PASS3D to achieve point-wise semantic segmentation for 3D point cloud. Our framework combines the effciency of traditional geometric methods with robustness of deep learning methods, consisting of two stages: At stage-1, our accelerated cluster proposal algorithm will generate refined cluster proposals by segmenting point clouds without ground, capable of generating less redundant proposals with higher recall in an extremely short time; stage-2 we will amplify and further process these proposals by a neural network to estimate semantic label for each pointand meanwhile propose a novel data augmentation method toenhance the network’s recognition capability for all categories especially for non-rigid objects. Evaluated on KITTI raw dataset, PASS3D stands out against the state-of-the-art on some results, making itself competent to 3D perception in autonomous driving system.
Guangyao Zhai
(翟光耀)