Efficient Motion Planning Based on Kinodynamic Model for Quadruped Robots Following Persons in Confined Spaces
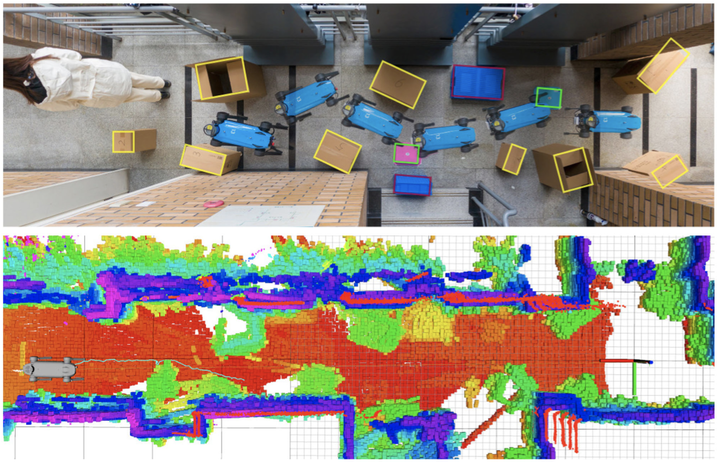 Glimpse of field tests. The quadruped robot follows the walking person in the confined space.
Glimpse of field tests. The quadruped robot follows the walking person in the confined space.Abstract
Quadruped robots have superior terrain adaptability and flexible movement capabilities than traditional robots. In this article, we innovatively apply it in person-following tasks, and propose an efficient motion planning scheme for quadruped robots to generate a flexible and effective trajectory in confined spaces. The method builds a real-time local costmap via onboard sensors, which involves both static and dynamic obstacles. And we exploit a simplified kinodynamic model and formulate the friction pyramids formed by ground reaction forces’ inequality constraints to ensure the executable of the optimized trajectory. In addition, we obtain the optimal following trajectory in the costmap completely based on the robot’s rectangular footprint description, which ensures that it can walk through the narrow spaces avoiding collision. Finally, a receding horizon control strategy is employed to improve the robustness of motion in complex environments. The proposed motion planning framework is integrated on the quadruped robot JueYing and tested in simulation as well as real scenarios. It shows that the execution success rates in various scenes are all over 90%.
Guangyao Zhai
(翟光耀)